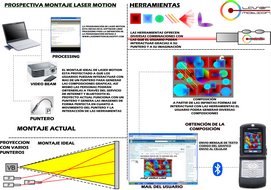
CODIGO LASER MOTION PROCESSING.
// IMPORTAR LIBRERIA OSCP5 - IMPORTAR IMAGEN LOGO.import oscP5.*;import netP5.*;PImage lasermotionn;
OscP5 oscP5;NetAddress myRemoteLocation;
//VARIABLES.
int posX = 0;int posY = 0;int xx=10;int yy=550;float c=random(120);float x = 360;float y = 240;float angle1 = 0.0;float angle2 = 0.0;float segLength = 50;float max_distance;
// VARIABLES HERRAMIENTAS Y CONTADOR.
int cont = 0;int tools = 0;
void setup() {
size(720,480); background(0); frameRate(25);
// PUERTO DE OSCP5
oscP5 = new OscP5(this,12000);
myRemoteLocation = new NetAddress("127.0.0.1",12000);}
void draw() {
smooth();
// CONTADOR CADA 150 CUADROS POR SEGUNDO CAMBIA LA HERRAMIENTA.
cont = cont + 1; print(cont); println(" cuadros"); if(cont >= 150){ println("han pasado 6 segundos"); cont = 0;
print("tools = "); println(tools); if(tools < 6){ tools = tools + 1; } else if (tools == 6){ tools = 0; background(0); }
}
// VELOCIDAD DE UTILIZACION DE CADA HERRAMIENTA - VARIABLE FLOTANTE QUE CAMBIA DE VALOR EN LAS POSICIONES X Y EN Y.
float speed = abs(X-posX) + abs(Y-posY);
//HERRAMIENTA DISTANCIA 2D CUADRADOS - FONDO.
if(tools==0){ noStroke(); fill (random(240),random(23), random(12),random(255)); max_distance = dist(0,0, posX, posY); for(int i=20; i
UBICACION DE LOS PUNTOS DE TRABAJO DE CAMPO EN LA CIUDAD DE BOGOTA



















No hay comentarios.:
Publicar un comentario